There is a spectrum of autonomous cars, according to the National Highway Traffic Safety Administration (NHTSA):
Level 0: The driver completely controls the vehicle at all times.
Level 1: Individual vehicle controls are automated, such as electronic stability control or automatic braking.
Level 2: At least two controls can be automated in unison, such as adaptive cruise control in combination with lane keeping.
Level 3: The driver can fully cede control of all safety-critical functions in certain conditions. The car senses when conditions require the driver to retake control and provides a "sufficiently comfortable transition time" for the driver to do so.
Level 4: The vehicle performs all safety-critical functions for the entire trip, with the driver not expected to control the vehicle at any time. As this vehicle would control all functions from start to stop, including all parking functions, it could include unoccupied cars.
An increase in the use of autonomous cars would make possible such benefits as:
Avoid traffic collisions caused by human driver errors such as reaction time, tailgating, rubbernecking and other forms of distracted or aggressive driving.
Increased roadway capacity and reduced traffic congestion due to reduced need for safety gaps and the ability to better manage traffic flow.
Relief of vehicle occupants from driving and navigation chores.
Higher speed limit for autonomous cars.
Removal of constraints on occupants' state – in an autonomous car, it would not matter if the occupants were under age, over age,unlicensed, blind, distracted, intoxicated, or otherwise impaired.
Reduction of physical space required for vehicle parking, and vehicles will be able to drive where space is not scarce.
Reduction in the need for traffic police and premium on vehicle insurance.
Reduction of physical road signage – autonomous cars could receive necessary communication electronically (although physical signs may still be required for any human drivers).
Smoother ride.
Reduction in car theft, due to the vehicle's increased awareness
Increased ergonomic flexibility in the cabin, due to the removal of the steering wheel and remaining driver interface, as well as no occupant needing to sit in a forward-facing position.
Increased ease-of-use of large vehicles such as motorhomes.
When used for carsharing,
Reduces total number of cars.
Enables new business models such as mobility as a service which aim to be cheaper than car ownership by removing the cost of the driver.
Elimination of redundant passengers – the robotic car could drive unoccupied to wherever it is required, such as to pick up passengers or to go in for maintenance.
Uber wants to follow the Netflix model, not the Blockbuster Video example. Uber’s business can be viewed a mobility as a service (maas). Uber CEO explains his company's highly ambitious goal to end car ownership in the world
In spite of the various benefits to increased vehicle automation, some foreseeable challenges persist:
Liability for damage. Liability may continue to lie with both the auto maker, as well as the individual owner.
Resistance by individuals to forfeit control of their cars.
Software reliability.
A car's computer could potentially be compromised, as could a communication system between cars by disrupting camera sensors, GPS jammers/spoofing.
Implementation of legal framework and establishment of government regulations for self-driving cars.
Drivers being inexperienced if situations arose requiring manual driving.
Loss of driving-related jobs. Resistance from professional drivers and unions who perceive job losses.
Loss of privacy. Sharing of information through V2V (Vehicle to Vehicle) and V2I (Vehicle to Infrastructure) protocols.
Competition for the radio spectrum desired for the car's communication.
Self-driving cars could potentially be loaded with explosives and used as bombs.
Ethical problems analogous to the trolley problem arise in situations where an autonomous car's software is forced during an unavoidable crash to choose between multiple harmful courses of action.
Susceptibility of the car's navigation system to different types of weather. (As of 2014 Google's prototype has not driven in snow or heavy rain.)
Autonomous cars may require very high-quality specialised maps to operate properly. Where these maps may be out of date, they would need to be able to fall back to reasonable behaviors.>
Current police and other pedestrian gestures and nonverbal cues are not adapted to autonomous driving.
Current road infrastructure may need changes for autonomous cars to function optimally. Some examples include traffic and street light upgrades that communicate with autonomous vehicles.
Chronology (from CS50 video)
NAVLAB, Carnegie Mellon University (now poached by Uber)
1995 drove 3000 miles from Pittsburg to San Diego, 98% autonomous mode

Cost: under $20K
GPS used for speed detection, not positioning.
RALPH (Rapidly Adapting Lateral Position Handler): As the vehicle moves along, a video camera mounted just below the rearview mirror reads the roadway, imaging information including lane markings, oil spots, curbs, and even ruts made in snow by car wheels. The camera sends the image to a portable computer between the car’s front seats that processes the data and instructs an electric motor on the steering wheel to turn right or left.
The driving system runs on the PANS (Portable Advanced Navigation Support) hardware platform. The platform provides a computing base and input/output functions for the system, as well as position estimation, steering wheel control, and safety monitoring. It’s powered from the vehicle’s cigarette lighter and is completely portable.
DARPA Grand Challenge
$2 million to build autonomous vehicle to drive 150 miles in desert.
2004 - best car went 11 miles.
2005 - 5 cars completed the course. Best was 7 hours by Stanley, from Stanford University.

Sensors: cameras (infrared and visible light), range finders, lidar (“LIght Detection And Ranging", or for "Laser Imaging, Detection and Ranging”)
Google Self driving car (very good videos). Chris Urmson TED talk. Driven of 1.2 million miles. Accidents occurred when vehicle was parked, or under human control, or hit by another vehicle that wanted to get a better look.

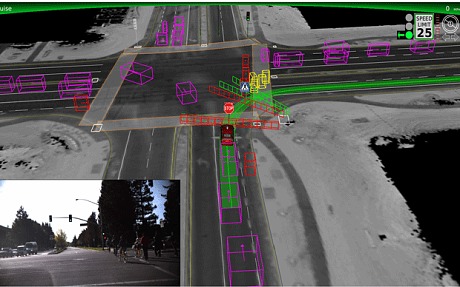
Screenshot of what the driverless car sees when turning right
Anti lock braking systems (ABS) are autonomous. The ABS is making the decision.
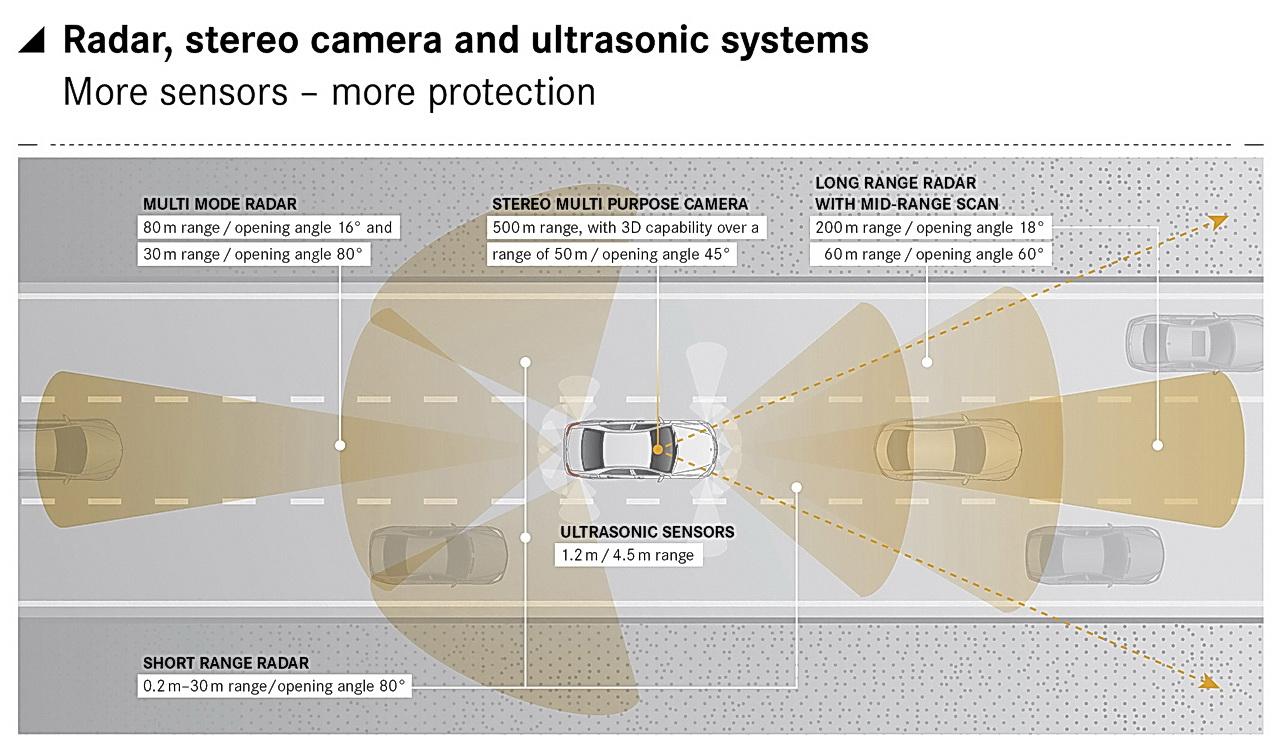
2003 - intelligent parking assist, Toyota and then others. Uses short range sensors, Driver issues “please park now” either parallel park or backing in. The car then takes over. Below is a diagram of the Mercedes sensors - can detect an obstacle and automatically steer away.
Recently (10/14/2015), Tesla introduced autopilot through software upgrade.
Stephen Colbert's Tesla

Can maintain speed, follow vehicle ahead, stay within lanes, or change lanes when the user signals.
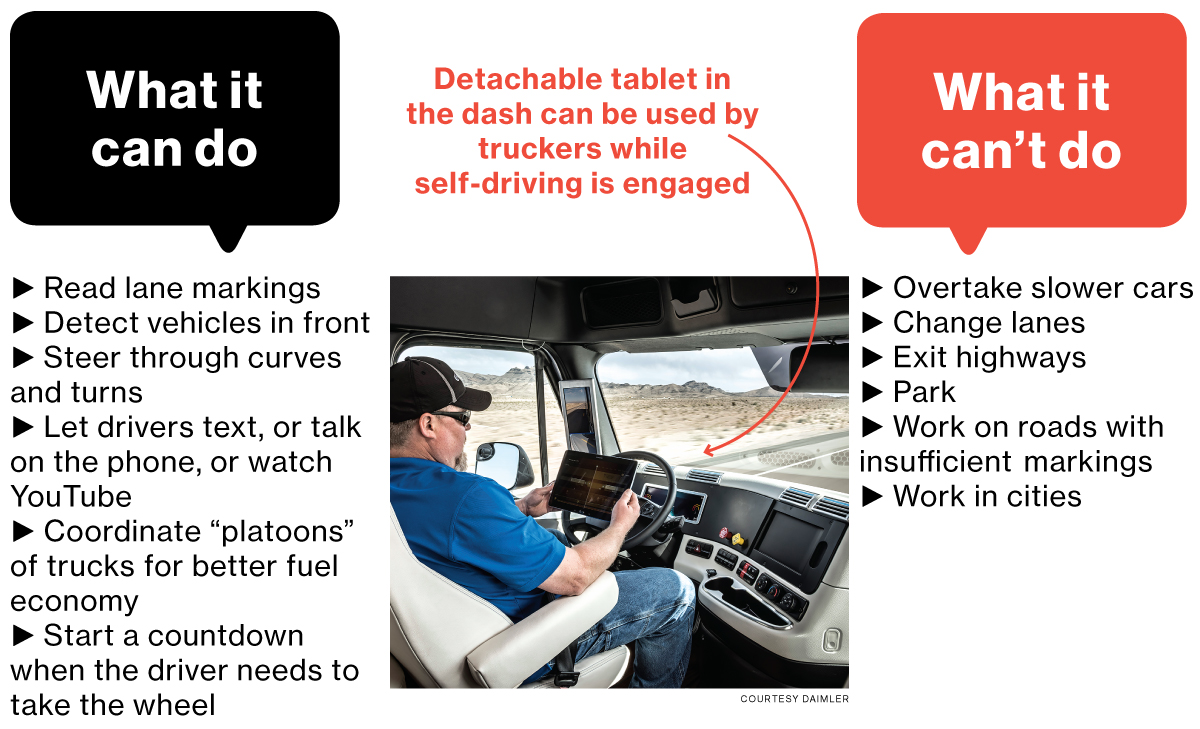
Freightliner (part of Daimler) has introduced autopilot for trucks: Highway Pilot. video
The self-driving mode works like this: While traveling along a clearly marked road, the truck’s main display will light up an indicator telling you Highway Pilot is available. You can activate it by pushing a button on the steering wheel. The system is similar to cruise control, except that it also steers the truck. You have to stay behind the wheel, though, in case the software determines that it can’t handle upcoming twists and turns. In that case, the dash starts a 20-second countdown back to human driving.

Teach Yourself to Program a Robotic Car Udacity course offered by Sebastian Thrun. Uses Python and interactive videos. Very spiffy.
The Moral Challenges of Self Driving Cars
By Keith Kirkpatrick
Communications of the ACM, Vol. 58 No. 8, Pages 19-20
http://cacm.acm.org/magazines/2015/8/189836-the-moral-challenges-of-driverless-cars/fulltext
Thierer, A., and Hagemann, R.,
Removing Roadblocks to Intelligent Vehicles and Driverless Cars, Mercatus Working Paper, September 2014,http://bit.ly/1CohoV8
Levinson, J., Askeland, J., Becker, J., and Dolson, J.
Towards fully autonomous driving: Systems and algorithms, Intelligent Vehicles Symposium IV (2011),http://bit.ly/1BKd5A4
Ensor, J.,
Roadtesting Google's new driverless car, The Telegraph, http://bit.ly/1x8VgfB
By MATT RICHTEL and CONOR DOUGHERTY SEPT. 1, 2015
|
Slade, Automated Decision Systems |
Page |